Command and Control Vehicle Testbed (C2V)

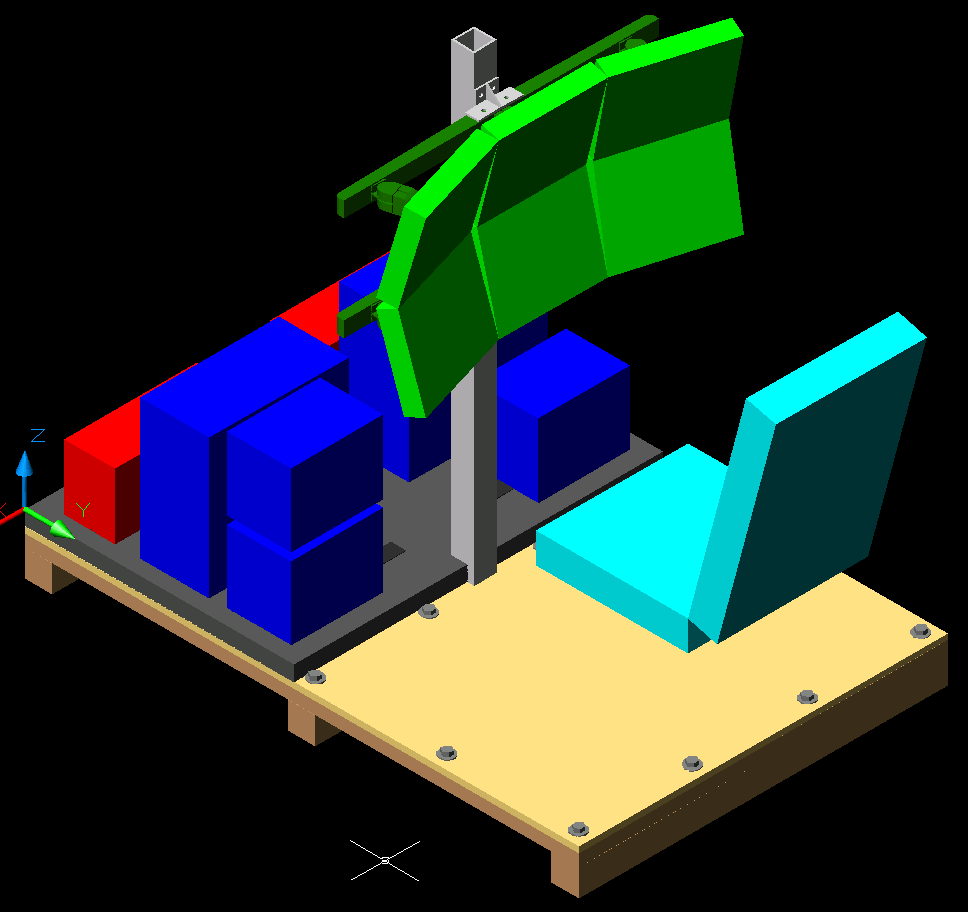
The Command and Control Vehicle Testbed or C2V was the first simulator I built while working at the University of Central Florida Institute for Simulation and Training. I made the design in Autodesk’s AutoCAD (yes I know, AutoCAD is very rudimentary for 3D solid modeling, but it is what I had at the time). I started working on it around July 2002 with a very rudimentary design using a wood platform.
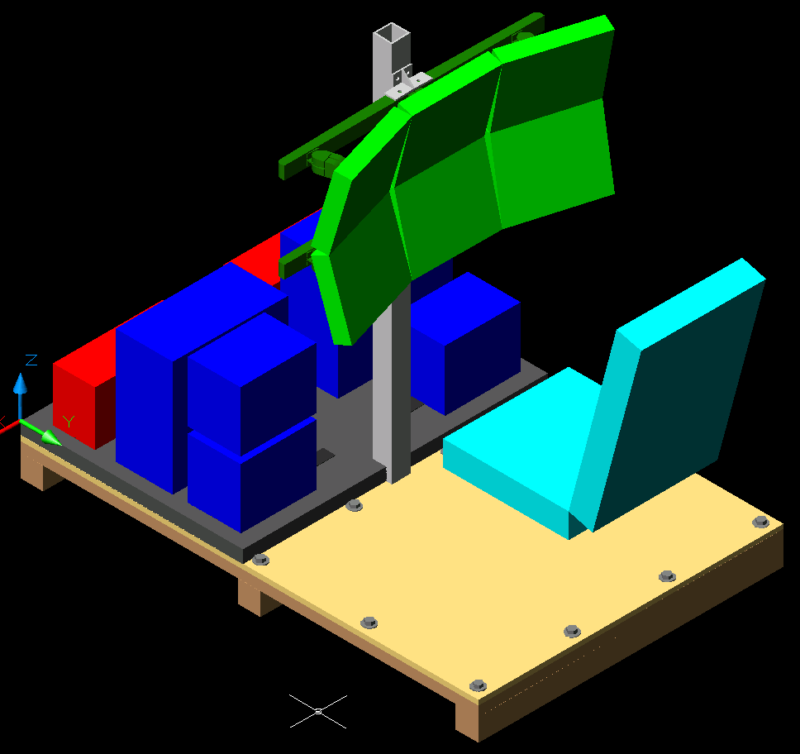
First Conceptual C2V CAD Solid Model 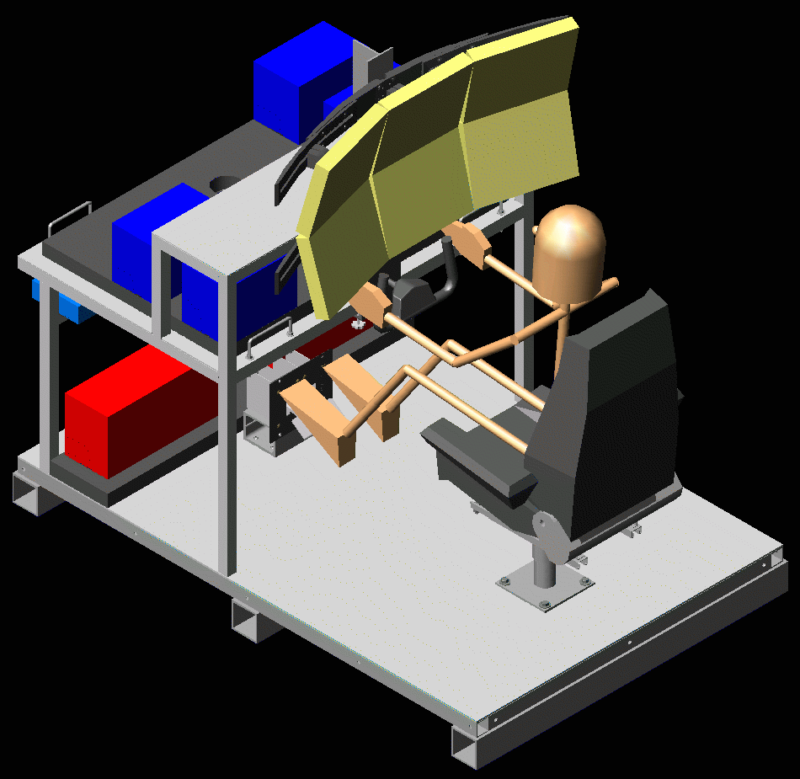
Refined C2V CAD Solid Model
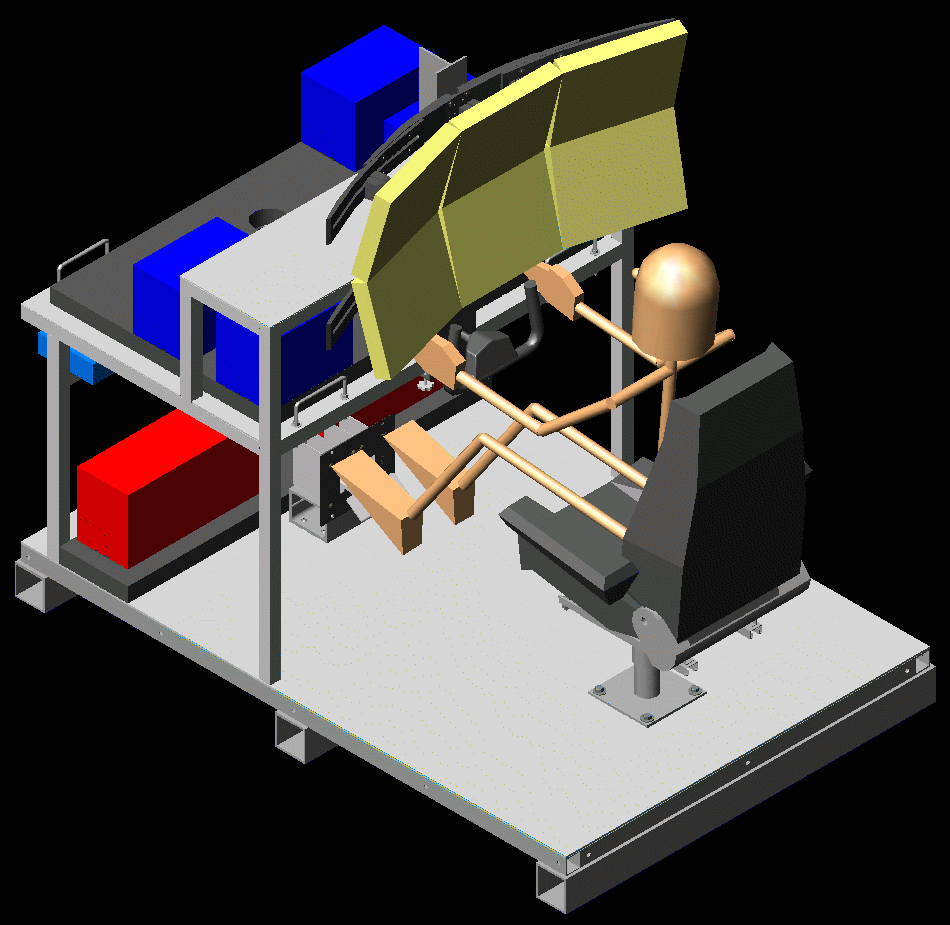
By August of 2002 it had quickly progressed into a more elaborate and ergonomically correct all metal design. The design consisted of a single seat crew-station with a yoke and pedals, and six touchscreens arranged in a 3×2 array. The main purpose of this testbed was to research concepts of command and control (C2) of semi-autonomous and tele-operated robotic assets.
Initially the testbed was designed and built with a 48″ wide frame, but I was later commissioned to re-design it to a minimal width frame that would be able to go through regular doors when shipped to shows.
We contracted Metters to build the frame, which was very convenient since they were next door. After the frame was delivered, we built the testbed all in-house.
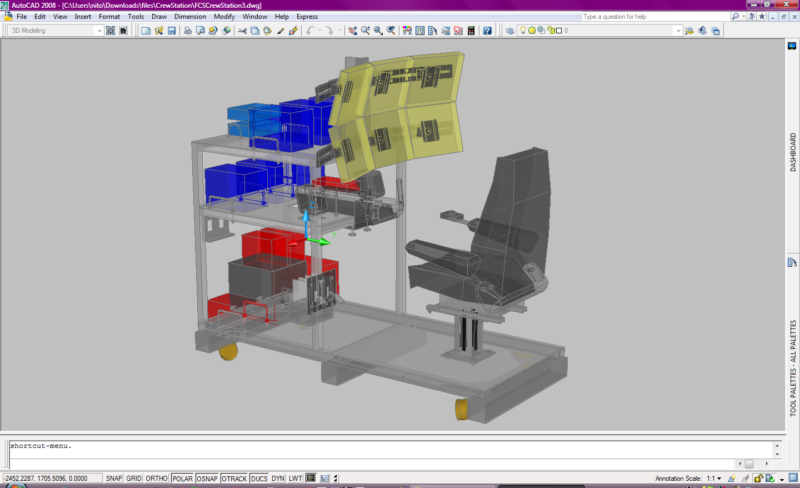
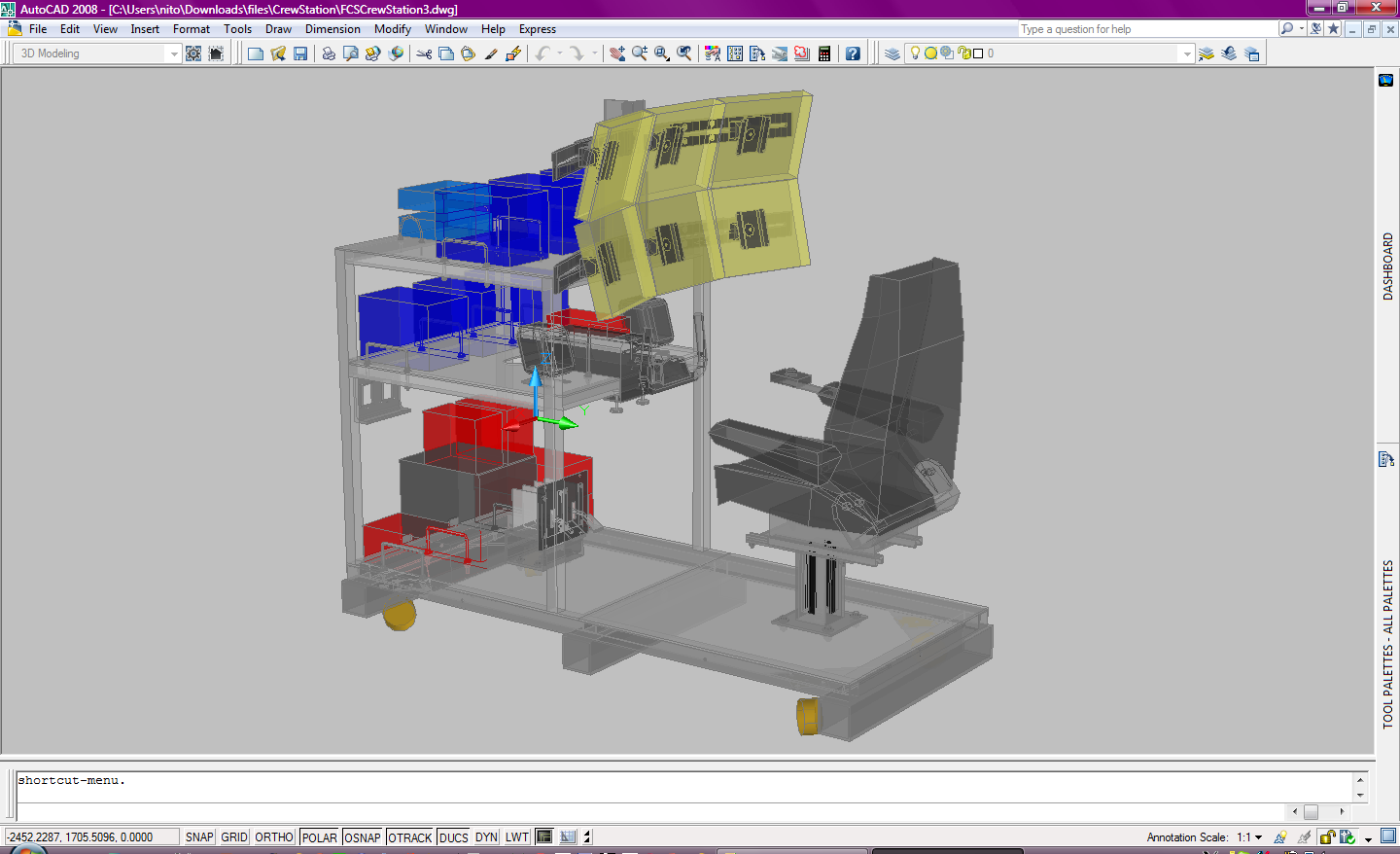
Final C2V CAD Solid Model 
Final C2V As-Built